Our Framework
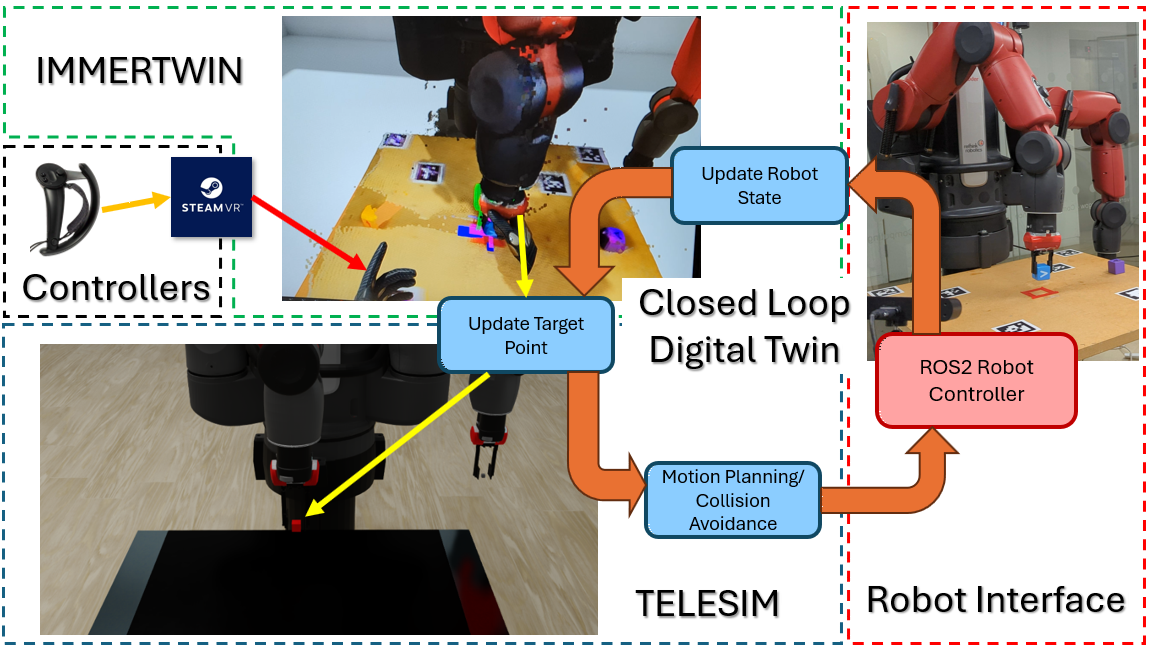
Our framework, IMMERWTIN, shown in the green dotted line, accepts the pose of any 3D VR controller (shown in the black dotted line) to update the position of the user's virtual hand in Unreal Engine. The user can then grab the robotic gripper and move the robot where they want. The new robotic goal is then transmitted to TELESIM (shown in the blue dotted line) to perform motion planning and collision avoidance. The state of the virtual robot is then transmitted to the real robot, shown in the red dotted line, to update its position. Finally, the state of the real robot is transmitted back into Unreal Engine to create a closed-loop digital twin.