Our Framework
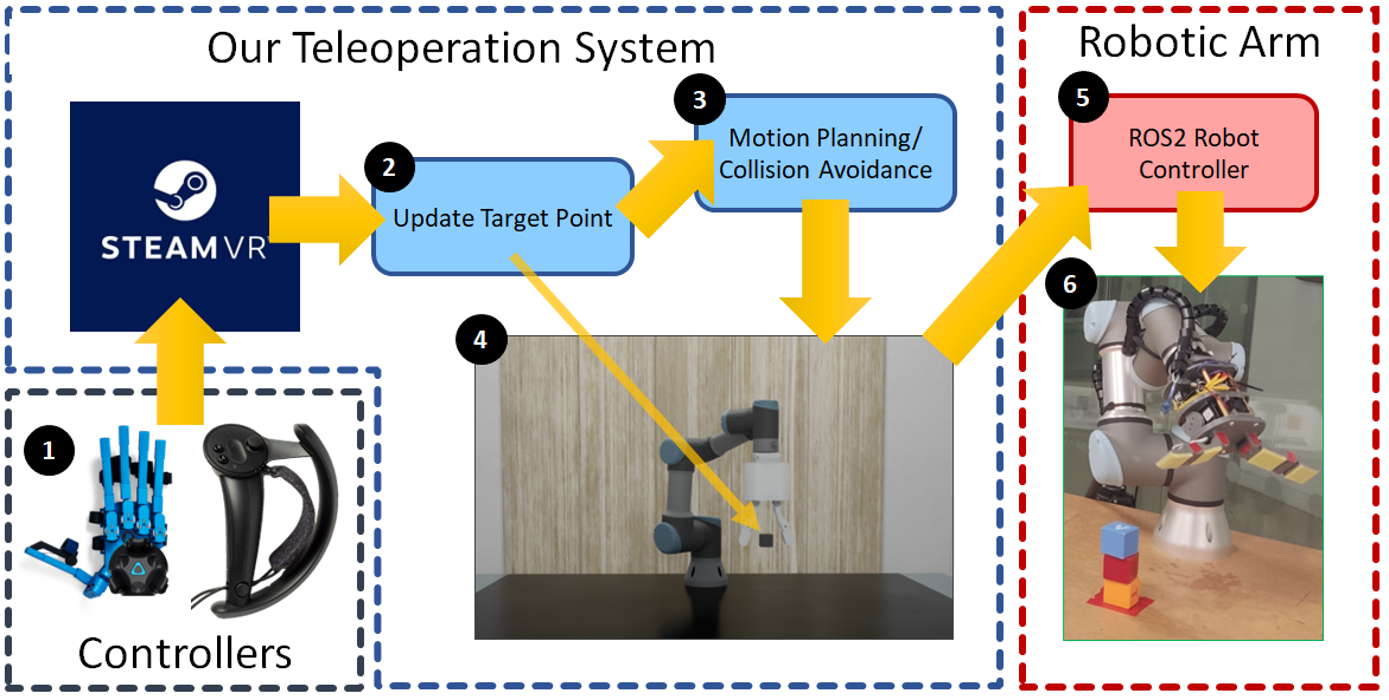
The controllers (in the black dotted line)(1) can be any system that outputs a 3D pose, while our framework is depicted in the blue dotted line. It accepts the pose given by (1) to update the 3D pose of a cube in the digital twin. The robot then calculates a path to this cube in real-time, while avoiding collision with the world (4). Finally, TELESIM can be plugged into any robotic system (6) via a ROS2 robot controller (5)\, as shown in the red dotted line.